Nama : Syaikhul Awwali
NIM : 18/430203/PA/18716
MOTOR DC
Pengertian Motor DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan. Motor Listrik DC tersedia dalam berbagai ukuran rpm dan bentuk.
Prinsip Kerja Motor DC

Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti. Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan
Simulasi
Cara Kerja Rangkaian Driver

Cara Kerja H-Bridge Transistor adalah saat input A bernilai 0 dan input B bernilai 0 juga maka transistor tidak akan aktif yang menyebabkan VCC tidak mengalir ke GND. Hal ini mengakibatkan motor DC tidak dapat berputar.

Cara Kerja H-Bridge Transistor adalah saat input A bernilai 0 dan input B bernilai 1 juga maka transistor T2 akan aktif dan transistor T3 yang menyebabkan VCC mengalir melalui motor DC menuju ke GND. Hal ini mengakibatkan motor DC berputar berlawanan arah jarum jam (CCW).

Cara Kerja H-Bridge Transistor adalah saat input A bernilai 1 dan input B bernilai 0 juga maka transistor T1 akan aktif dan transistor T4 yang menyebabkan VCC mengalir melalui motor DC menuju ke GND. Hal ini mengakibatkan motor DC berputar searah arah jarum jam (CW).
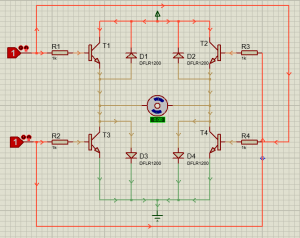
Cara Kerja H-Bridge Transistor adalah saat input A bernilai 1 dan input B bernilai 1 juga maka transistor tidak akan aktif yang menyebabkan VCC tidak mengalir ke GND. Hal ini mengakibatkan motor DC tidak dapat berputar.
Fungsi pada dioda dalam rangkaian adalah sebagai proteksi. Hal yang perlu diketahui adalah kedua input A dan B tidak boleh memiliki logika 1 secara bersamaan karna jika terjadi akan mengakibatkan arus listrik mengalir secara langsung dari kutub positif ke kutub negatif (konsleting)
Untuk mengatasi hal tersebut sobat dapat membuat rangkaian H-bridge transistor dengan sistem proteksi
MOTOR STEPPER
Pengertian Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Kenapa disebut diskrit? Karena sebenarnya motor stepper berputar secara bertahap, tidak kontinyu seperti berputarnya motor AC induksi. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
Prinsip Kerja Motor Stepper
Prinsip kerja motor stepper adalah bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit dimana motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor stepper tersebut. Motor stepper putarannya dapat dikontrol per derajat (1 step) dengan menggunakan pulsa listrik yang diberikan, ketelitian putaran motor stepper ditentukan dari banyaknya jumlah step yang dimiliki motor tersebut.
Berbeda dengan motor DC yang dapat langsung dihubungkan dengan catu daya agar dapat berputar, untuk menggerakkan motor stepper, kita harus memberikan pulsa 5V pada 4 pin motor steppper dengan pola urutan tertentu. Satu urutan tertentu tersebut akan menggerakkan satu step (sekian derajat sesuia derajat spesifikasinya (x0)) dan untuk memutar sati putaran penuh stepper motor (3600), dapat dilakukan dengan mengulang 1 step tersebut sebanyak n kali (n x x0 = 3600).

Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Perhatikan gambar di bawah ini.

Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun atau berubah – ubah dari positif ke negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar torsi yang lebih besar dibandingkan dengan motor stepper unipolar untuk ukuran yang sama.
Motor stepper dapat dijalankan dalam dua mode, yaitu mode half step dan mode full step. Pada mode full step akan diberikan variasi input yang membuat motor bergerak sesuai dengan derajat spesifikasinya.
MODE FULL STEP
SEARAH JARUM JAM
BERLAWANAN ARAH JARUM JAM


Jika diperhatikan, signal pulsa seolah – olah berjalan dari phase A ke phase B dan seterusnya. Sehingga bagian rotor yang diibaratkan seperti magnet akan berputar karena tertarik oleh gaya magnet yang dibangkitkan oleh setiap phase. Pemberian signal seperti di atas adalah metode full step, sehingga untuk 1 putaran penuh dibutuhkan 4 kali step.
MODE HALF STEP
SEARAH JARUM JAM
BERLAWANAN ARAH JARUM JAM


Untuk selanjutnya, perintah step untuk merubah kondisi logic phase dilakukan dengan memberi pulse atau clock pada driver motor stepper. Dengan demikian, pada metode full step, jika diberikan pulsa sebanyak 8 kali, maka motor akan berputar 2 putaran. Begitu juga jika diberikan pulsa sebanyak 16 kali, maka motor akan berputar 4 putaran. Berapa jumlah putaran jika hanya diberi 3 pulsa? Ya betul, hanya ¾ putaran saja atau 270 derajat. Dari sini dapat kita pahami bahwa untuk mengatur sudut putaran sebuah motor Stepper, maka yang harus diatur adalah jumlah pulsa yang diberikan pada drivernya.
KODE PROGRAM ARDUINO
int IN1=8;
int IN2=9;
int IN3=10;
int IN4=11;
int delaytime=1000;
void setup(){
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop(){
fullCCW();
//Ganti sesuai yang diinginkan
}
void fullCW(){
step1();
delay(delaytime);
step2();
delay(delaytime);
step3();
delay(delaytime);
step4();
delay(delaytime);
}
void halfCW(){
step1();
delay(delaytime);
step1_5();
delay(delaytime);
step2();
delay(delaytime);
step2_5();
delay(delaytime);
step3();
delay(delaytime);
step3_5();
delay(delaytime);
step4();
delay(delaytime);
}
void fullCCW(){
step4();
delay(delaytime);
step3();
delay(delaytime);
step2();
delay(delaytime);
step1();
delay(delaytime);
}
void halfCCW(){
step4();
delay(delaytime);
step3_5();
delay(delaytime);
step3();
delay(delaytime);
step2_5();
delay(delaytime);
step2();
delay(delaytime);
step1_5();
delay(delaytime);
step1();
delay(delaytime);
}
void step1(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,HIGH);
}
void step1_5(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void step2(){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void step2_5(){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void step3(){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void step3_5(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void step4(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}